CAN通信の基礎~comqudaによる受託試験サポート~
概要
CAN(キャン)Controller Area Networkは、自動車の内部でコンピューター(ECU)同士が通信するための規格です。
もともとはドイツのボッシュ社が自動車向けに開発しましたが、その信頼性の高さから、現在では産業用ロボット、
医療機器、船舶、エレベーターなど、様々な分野で利用されています。
なぜCANが必要になったのか?
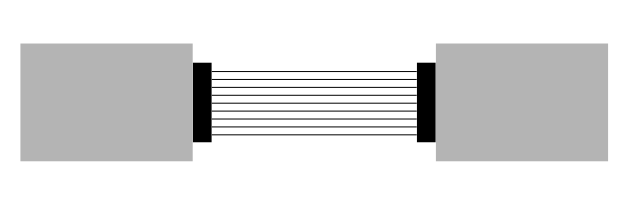
かつて自動車の電子機器は、それぞれが1対1の配線で接続されていました。
しかし、機能が増えるにつれて配線の束(ワイヤーハーネス)は非常に重く、複雑になりました。
【課題】従来の配線方式
・配線が多すぎて、重く、コストも高い
・システムの追加や変更が難しい
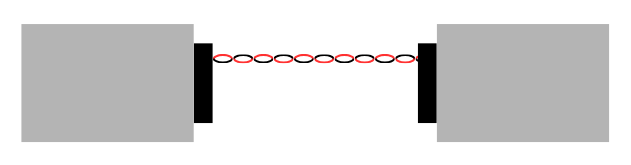
そこで、2本の通信線だけでネットワークを構築し、この問題を解決するためにCANが開発されました。
【解決】CANバス方式
・新しいECUの追加が容易
・配線が劇的に少なくなり、
軽量化とコストダウンを実現
CANの仕組み:IDを使った「同報通信」
CAN通信では、特定の相手を指定してデータを送るのではなく、**ID(識別子)**を付けたデータを
ネットワーク全体(バス)に流します。これを「同報通信(ブロードキャスト)」と呼びます。
各ECUはバスを流れる全データを受け取りますが、そのIDを見て自分に必要な情報だけを取り込みます。
送信: 「車速センサー」がID 0x100(車速データ)を付けて「60km/h」という情報をバスに流す。
受信: 全てのECUがID 0x100のデータを受信する。
判断:メーターECU: 「自分に必要なIDだ」→ 速度を表示する。
エンジンECU: 「自分に必要なIDだ」→ 燃料噴射の計算に使う。
ライトECU: 「自分に関係ないIDだ」→ データを無視する。
CANの主な特徴
高い信頼性:エラー検出機能とノイズへの強さを両立しています。
マルチマスター:親機が存在せず、どのECUからでも情報を発信できます。
優先順位:ID番号が小さいデータが優先される仕組みがあり、
緊急性の高い情報(ブレーキ等)が確実に先に伝わります。
最大の特徴:差動信号方式
CANは、CAN_H(high)とCAN_L(low)という2本の電線を使った「差動信号」で通信します。これにより、外部からのノイズに非常に強くなります。
- 優性ビット(Dominant)=「0」: 2本の線に電圧差を作る。
- 劣性ビット(Recessive)=「1」: 2本の線の電圧差をなくす。
外部ノイズは2本の線に同じように影響するため、電圧「差」は変化しにくく、通信エラーが起きにくいのです。
各部品の具体的な役割
IC (特に「CANトランシーバーIC」)
これがCAN通信の主役となる部品です。CANコントローラー(マイコンなどに内蔵)から来るデジタルな「0」や「1」の信号を、物理層のルールに従って実際の電気信号(CAN_HとCAN_Lの差動信号)に変換する役割を担います。逆も同様で、バス上の電気信号をデジタル信号に戻してコントローラーに渡します。
- CANコントローラー: 「データを送るぞ!」と指示を出す司令官
- CANトランシーバーIC: 指示を受け、電気信号に翻訳してバスに流す通訳者・メッセンジャー
コンデンサ (Capacitor)
コンデンサは、主役というよりはサポート役です。主に次のような目的で使われます。
信号の安定化: バス全体の電気的な特性を安定させ、信号品質を向上させるために使われることがあります。
(例:スプリット終端)
ノイズ除去: 電源ラインや信号ラインのノイズを吸収し、ICが安定して動作できるようにします。
信頼性試験・評価のご相談・お見積り
車載ECUの信頼性評価でお困りのことがございましたら、お気軽にお問い合わせ・ご依頼ください。
経験豊富な技術者がお客様のニーズに合わせた最適な受託試験のご提案いたします。